CS107
Lec 8 堆和栈
主要内容:
- 堆内存管理
- malloc free 函数的实现思路
- 栈
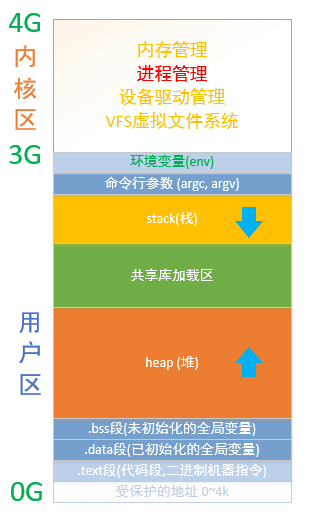
linux 进程空间模型:
堆内存管理
当程序被加载到内存时,堆的两个边界低地址和高地址被库代码用来实现malloc, free, realloc 部分,并且记录下来
malloc 函数用来分发堆内存的地址,在内部该函数记录了每个分配内存块的实际大小。这样调用free函数并传入地址时free能够精确地知道需要归还的内存大小。
malloc, free, realloc 是通过软件来实现,实现者可以使用他们想到的多种启发式策略,来让这些函数能够正确运行的同时保证尽可能的快速且高效。
启发式策略和堆管理器实现原理
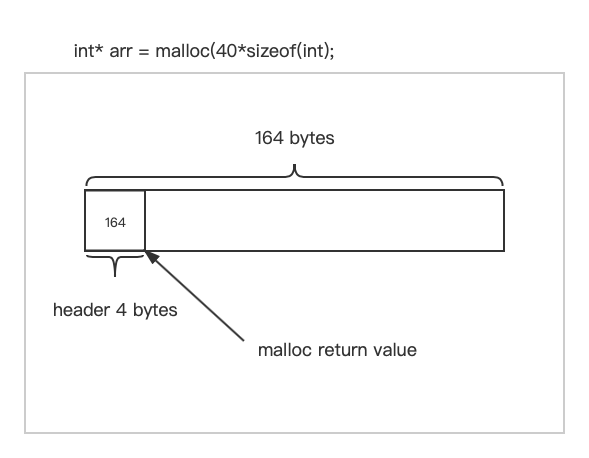
int* arr = malloc(40* sizeof(int));
看上去得到了160字节的空间,实际上管理这块空间需要额外的空间开销。
将指针作为参数传递给realloc或者free,该指针应该之前被malloc或者realloc函数调用处理过,这样才是合法的。
内存中留出的空间实际上是要大于申请的字节数。
在malloc函数返回分配的地址时,函数可能会预留出164字节或者168字节的空间(也可能是176字节或者192字节,这与规范有关),多出的这部分位于160字节之前,这段空间(header)用于记录该块内存的大小。
将malloc 返回的地址传给free函数,free会假设这个地址已经被正确的处理过,是一个合法的地址,那么就可以通过额外的header中记录的内存大小。
可以void* 强制转换为其他指针类型,退回4个字节或者8个字节来访问header中的内容。通过header的格式来解释这4字节或者8字节的内容->164 这段内存将归还给heap。
// why they don't work
int* arr = malloc(100*sizeof(int)); // 404 or 408 bytes
// 假设只使用了60字节的空间, 剩余的空间想归还给heap 错误的调用方式
free(arr + 60);
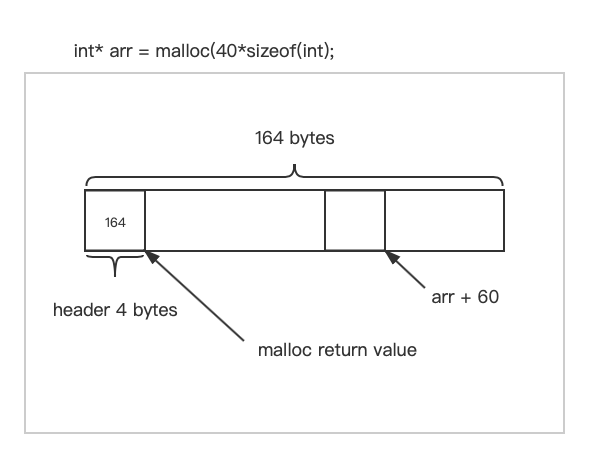
将这个地址传给free,free的实现可能非常原始并且不进行错误检查合法性。malloc,free,realloc都是本着尽可能快速执行的原则实现的,因此不会对传入的地址进行检查。因为它们都假设你是非常擅长C和C++编程的。因此不会在调用时进行错误检查。
free函数执行时只会回退4或8个字节,无论下标58和59里面一个int 或者两个int是什么,函数都将它解释称header中的内容,假设这里面存储的是实际分配的空间大小。按照这个空间大小向后找到一段内存并且使用内存释放算法。
// 在栈上分配内存
int arr[100];
free(arr);
如果free函数不进行任何错误检查的话,当然free函数没有义务去做这些错误检查,以确保这个地址是被malloc 或者 realloc返回的。函数只会从arr的地址回退4或者8个字节,无论里面的内容是什么都将被按照header的格式进行解释。即内存块的大小。将这段内存归还给堆,以便对可以对其分配。
实现:不进行错误检查
执行最快的实现方式就是对这些函数不进行错误检查,由调用者来保证
实现:记录分配的地址,进行错误检查
有些实现的确会进行错误检查:它会记录下已分配的void*指针。并且通过将传入的参数与保存下来的void*对比进行快速检查。以确保传入的地址是记录下void*中的一个。在debug模式下,如果地址不合法,程序会报错。如果在release模式下地址不合法,编译器会忽略错误并且不会释放这块内存,因为这样做的话之后会出问题。
实现: 按照2的幂次将内存分段
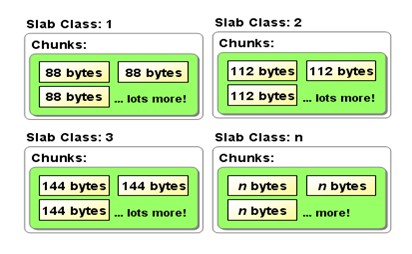
另一种实现方式,是将heap中的内存按照2的幂次进行分块。 如果申请的内存 <=8 字节,将在第一个区域中分配8 字节内存返回地址给调用者;如果申请的内存在(8, 64] 之间,会在第二个区域中分配64字节内存返回地址给调用者。即函数不会每次都分配精确的空间大小,因为这样会做很多额外的工作。将大块内存切分成各个子内存段,这样就能更快速的管理内存,并且简介地组织内存段。
这样,当申请160字节空间时,实际上分配的可能是192字节或者256个字节,具体取决于实现。
虽然如此,我们只能保证这160字节的空间是我们可以使用的,因为实现的方式不止这一种。
数组的边界溢出问题
如果从后向前遍历,越过了边界访问了arr[-1] 元素,它里面实际上时malloc 以及 realloc 写入的分配内存块大小的信息。
如果访问内存的时候,从后向前遍历并清零,越界将arr[-1] 中malloc留下的信息修改成了0。这样free和realloc函数将不能正确的执行任务。
实现:不仅记录内存块的大小,而且记录下一块空闲内存块地址
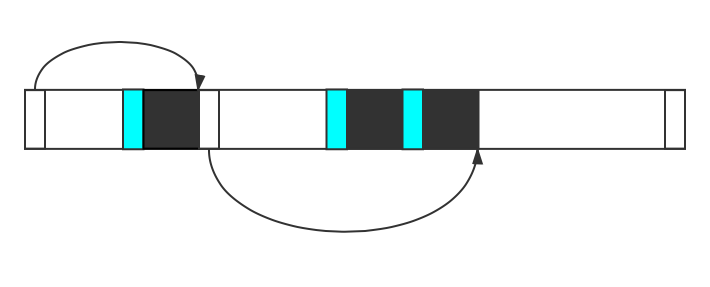
通过这样的实现可以对realloc进行一定程度的简化和优化。当调用malloc和realloc时,函数希望能快速扫描堆中未使用的内存块。
函数通常会使用一个内存块的linked list 来记录空闲内存块。当malloc或者realloc函数调用时heap manager 都会遍历这个链表,找到满足要求的内存块。
一种简单的策略是选择满足请求的第一块空闲内存。即首次适配策略:从低地址开始搜索空闲块。
最佳适配:希望找到大小与malloc调用指定参数差距尽可能小的内存块。这样分配不会使用额外的内存。
最差适配: 扫描整个堆,找到可以使用的最大的内存块。
在malloc结束后记录指向哪里,这样在下次调用时从这个位置开始向后扫描并进行分配,保证堆的每个部分都能被访问到。
其他实现
在header中再保存一些信息来简化free和realloc实现
在释放内存时不会对其中内容进行清零,理论上可以这么实现,但是清空这些内存时需要花时间的。如果这块内存有1M大小,那么为何要对用户不再使用的空间中的信息进行清空呢?
有些实现不希望两个相邻的空闲内存块,而是将它们合并成一个大的内存块。相比于将整块内存打碎的方式,这样空闲链表会更加简洁灵活。
另一种实现:free 中仅记录了需要释放的地址,在下一次malloc或者realloc时将对应的内存进行释放。
内存碎片
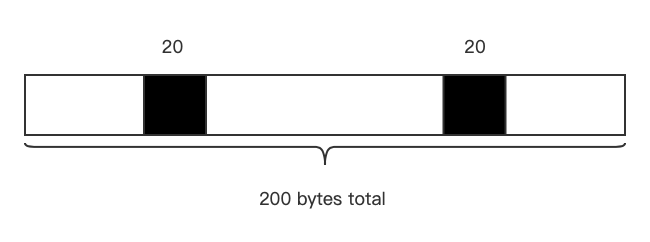
虽然空闲块的总和满足条件,但是它们在内存中不是连续的,没有按照用户希望的方式聚在一块。
因此调用malloc申请100字节空间或者160字节时,malloc会认为分配失败并返回NULL。
是否通过内存搬移将已分配的内存紧凑排列,尝试将已分配的内存都放置在最前端。 这样有一个问题:malloc realloc已经将内存块的地址交给用户进行管理了。如果此时进行内存搬移,将导致用户访问错误的位置。
堆压缩算法
Macintosh曾经使用了堆内存压缩的算法。 在堆中预留了很大的空间放置handler(void**) 并且维护一个void* 列表,返回的句柄距离实际的内存位置两个hops的距离,这样在进行内存搬移的时候修改(void*) 即可,用户仍然能够访问搬移后正确的内存块。
这个任务在后台由一个低优先级的线程进行。如果有命令强制执行压缩,或者空间不足,该线程的优先级会提升。不过堆内存的压缩和对堆内存的访问是不可以同时执行的。因为不能在内存块搬移过程中对内存块中的内容进行修改。
void** handle = NewHandle(40);
// 告诉操作系统此时不要对当前的handle对应的内存块进行堆内存压缩操作,对其他的块可以进行内存压缩。
HandleLock(handle);
//访问这块堆内存.
visit(handle);
// 告诉操作系统此时可以对handle对应的内存块使用内存压缩操作
HandlUnlock(handle);
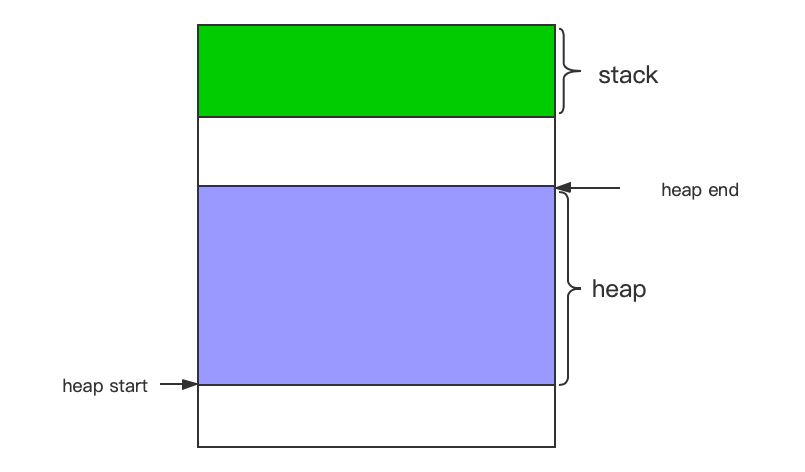
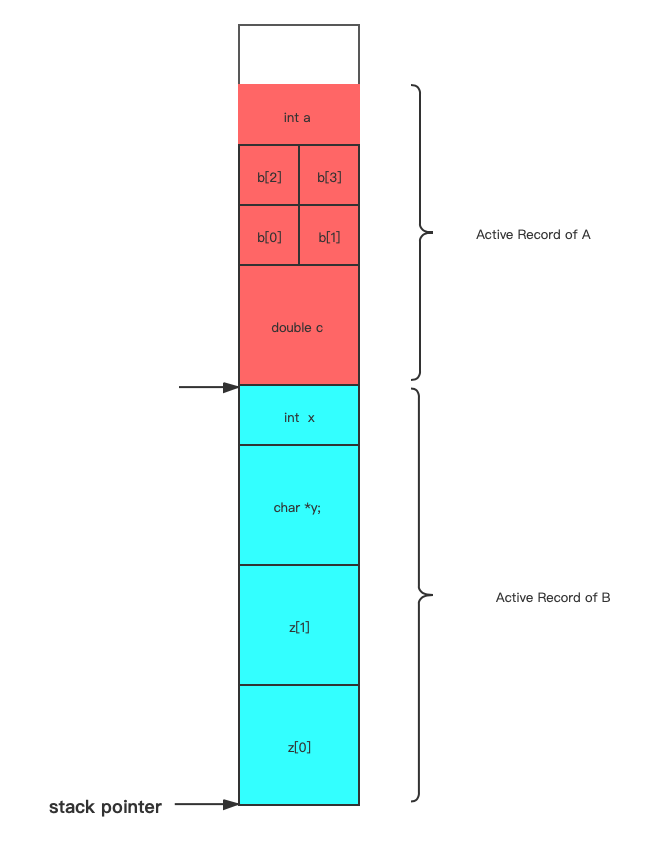
栈 stack segment
通常在更高地址空间,程序刚刚开始执行时使用栈空间最小,是因为此时只用很少的活动函数。
通常,栈中被使用的部分大体上与活动函数的数量成比例。
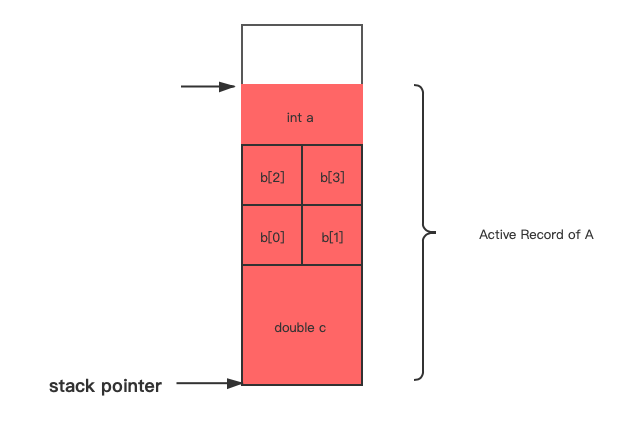
void A()
{
int a; // 4
short array b[4]; // 8
double c; // 8
B();
C();
} // 24
void B()
{
int x = 0; // 4
char *y = NULL; // 8
char* Z[2]; // 16
C();
} // 32
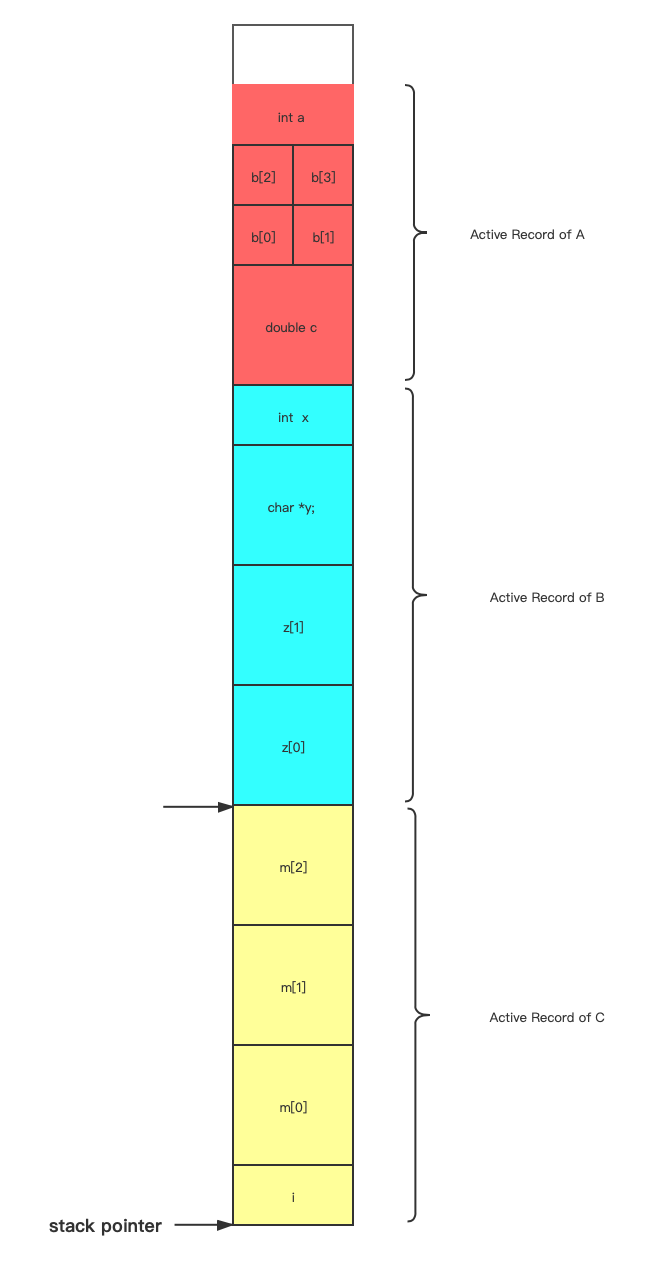
void C()
{
double m[3] = {0}; // 24
int i = 0; // 4
} // 32
当调用函数A时,栈会为局部变量留出空间 具体留出空间的大小取决于cpu是32位还是64位,以及内存对齐模数。
活动记录/栈帧
active record / stack frame
假设A将被调用,指针将减去对应的大小,为函数中的局部变量留出空间,并且此时程序并不会失去A之前所有调用函数中的变量,它们只是被暂时挂起了。
当A调用函数B和函数C时,会将栈指针再次减小为函数B和C中的局部变量留出空间。
这些指针实际上使用硬件存储,实际上它就是被称作stack pointer 的东西,并且总是跟踪指向最近调用的函数的活动记录。
当函数A调用函数B,栈指针会继续减小,为函数B中的局部变量留出空间。函数B并不能访问上面的局部变量,因为它不知道上面是什么,只是碰巧在它上面,不过函数B能够访问对应活动记录中的变量。
因为B又调用了C,栈指针会进行同样的操作。
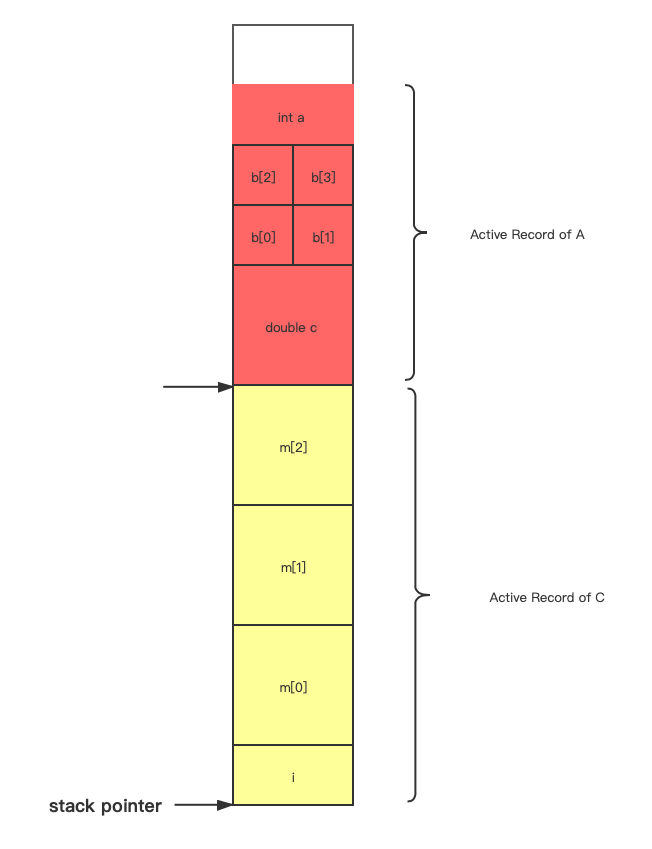
当函数C退出后,栈指针会上升,回到C调用的位置,C函数活动记录中的内容在栈中仍然存在,不过它已经不能被看到并访问了。
函数B返回,也是同样的操作,栈指针回到B调用之前的位置,好像并不知道函数B在最近被调用过一样。
此时调用函数C 它实际上将原来调用函数B时的活动记录覆盖了,当然C并不能解释B的活动记录中的内容,它甚至不知道函数B在最近被调用过。 C只是获得了可以认为是随机的值,如果想要正确利用这些空间,就要将它们初始化成有意义的值。
汇编代码如何进行栈操作
与堆空间相比,栈空间其实不是很大,尤其是在程序刚运行的时刻,大块内存都是运行过程中在堆中申请的。
计算机处理器的行为方式: load/store 结构
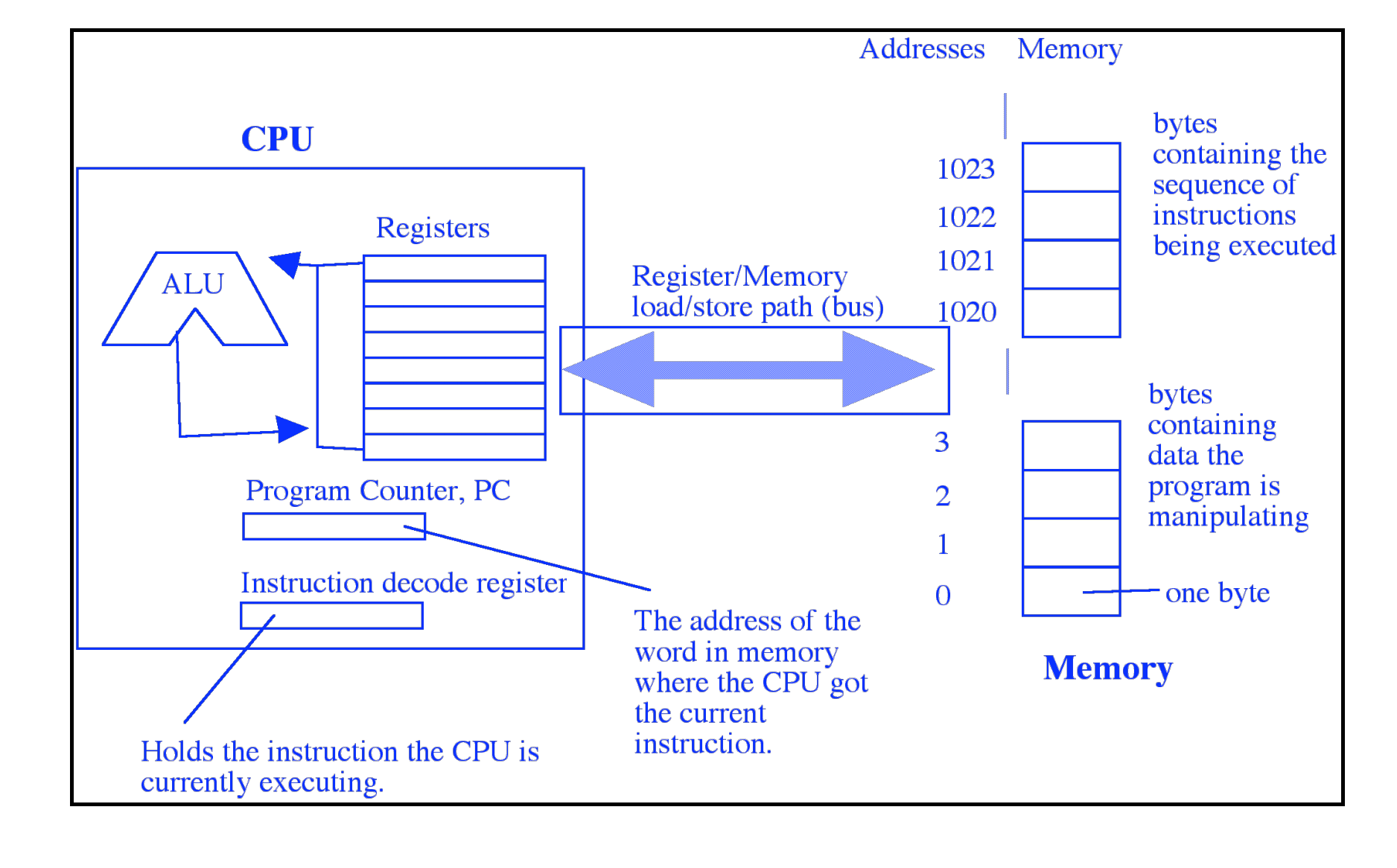
通过cpu中的寄存器对数据进行存取,访问速度极快。技术上每个寄存器都可以从RAM中获取信息或者将信息写入RAM中。
ALU负责执行模拟我们能理解的加法,乘法,对比特位进行左移和右移等操作。通过寄存器来修改RAM中的值
另一种方式是让ALU与整个RAM连接,这样做要么价格非常昂贵,要么就是速度很慢(时钟周期变得很大)。会让二者之间的连接更加复杂,当硬件连接变得复杂时,通常时钟周期会变大。甚至不能对RAM 和寄存器中的操作数提供较多的运算。
所以通过load/store 方式在寄存器与通用RAM上传输数据,当数据装入寄存器中时,才会使用其中的数据进行运算,运算完成后再将结果写到RAM中。
- 将RAM中的数据(无论是堆中的还是栈中的)装到寄存器中
- ALU对寄存器中的数据进行运算,结果保存在另一个寄存器中
- 将另一个寄存器中的结果写到RAM中属于它的内存。
void test()
{
int i = 7;
int j = 10;
j += i;
}
# 编译器版本:ARM gcc 11.1 (linux)
push {r7}
sub sp, sp, #12
add r7, sp, #0
movs r3, #7
str r3, [r7, #4]
movs r3, #10
str r3, [r7]
# j += i 对应以下四句汇编代码
ldr r2, [r7]
ldr r3, [r7, #4]
add r3, r3, r2
str r3, [r7]
nop
adds r7, r7, #12
mov sp, r7
ldr r7, [sp], #4
bx lr
硬件设计者希望在硬件级别上完成各种原子操作,并且还希望硬件可以运行的更加快速。